#include <cstdint>
#include <cstring>
#include <bit>
#include <concepts>
#include <iomanip>
#include <algorithm>
#include <glm/common.hpp>
#include <glm/vec2.hpp>
#include <glm/vec3.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtx/intersect.hpp>
Go to the source code of this file.
|
| #define | CXX_THROW(class, ...) throw class(__VA_ARGS__); |
| |
|
| template<class To , class From > |
| std::enable_if_t< sizeof(To)==sizeof(From) &&std::is_trivially_copyable_v< From > &&std::is_trivially_copyable_v< To >, To > | std::bit_cast (const From &src) noexcept |
| |
| template<typename T > |
| constexpr T | std::byteswap (T value) noexcept |
| |
| template<typename ORange , typename OIt = decltype(std::begin(std::declval<ORange>())), typename It = std::reverse_iterator<OIt>> |
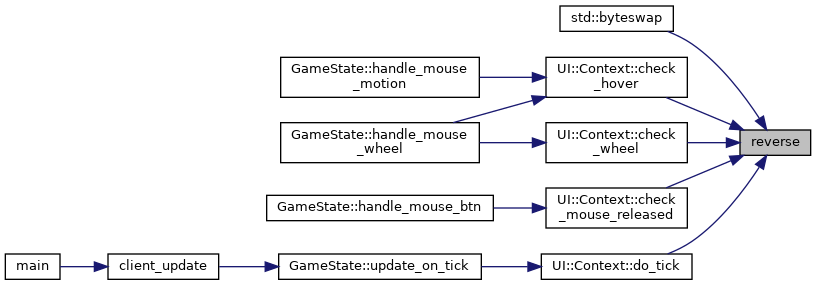
| Range< It > | reverse (ORange &&originalRange) |
| |
| template<typename C , typename T > |
| void | Eng3D::fast_erase (C &c, T value) noexcept |
| |
| template<typename C , typename T > |
| void | Eng3D::fast_erase_all (C &c, T value) noexcept |
| |
| glm::vec3 | Eng3D::get_sphere_coord (glm::vec2 size, glm::vec2 pos, float radius) |
| |
| float | Eng3D::euclidean_distance (glm::vec2 size, float radius, glm::vec2 p0, glm::vec2 p1) |
| | Obtain the euclidean distance from p0 to p1. More...
|
| |
◆ CXX_THROW
| #define CXX_THROW |
( |
|
class, |
|
|
|
... |
|
) |
| throw class(__VA_ARGS__); |
◆ reverse()
template<typename ORange , typename OIt = decltype(std::begin(std::declval<ORange>())), typename It = std::reverse_iterator<OIt>>
| Range<It> reverse |
( |
ORange && |
originalRange | ) |
|